Sensor-based bicycle assistance system to increase safety and comfort
Bicycles, especially e-bikes/pedelecs, not only increase the mobility and independence of older people, but also have a positive impact on their health and well-being. In order to minimise the risk of accidents, this project aims at minimising the risk of accidents by developing a bicycle assistance system that compensates for cognitive and physical deficits of senior citizens and provides them with important information in complex traffic situations in a context-appropriate manner and as barrier-free as possible.


Term:
15.05.2017 – 14.05.2020
IMST goals:
IMST is developing a special 24 GHz radar module for the project, which can detect obstacles in the direction of travel.
Requirements for the radar:
- Narrow opening angle in elevation (approx. 10°)
- Wide opening angle in azimuth (approx. 70°)
- 2 transmitting antennas (wide for city, narrow for country road)
- 4 receiving antennas (enable digital beamforming)
- Simultaneous acquisition of multiple targets, each with determination of distance, speed and azimuth view angle
- Ethernet and USB interface
Sensor-based bicycle assistance system to increase safety and comfort
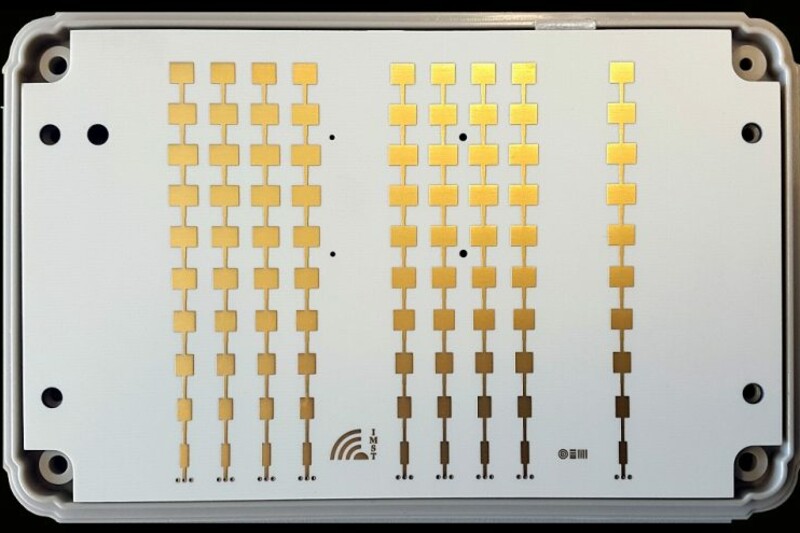
The photo shows the radar built into a housing. The front panel consists of 2 transmit antennas with wide and narrow beam angle and one receive antenna. The four antenna strings can be controlled individually to enable digital beamforming.
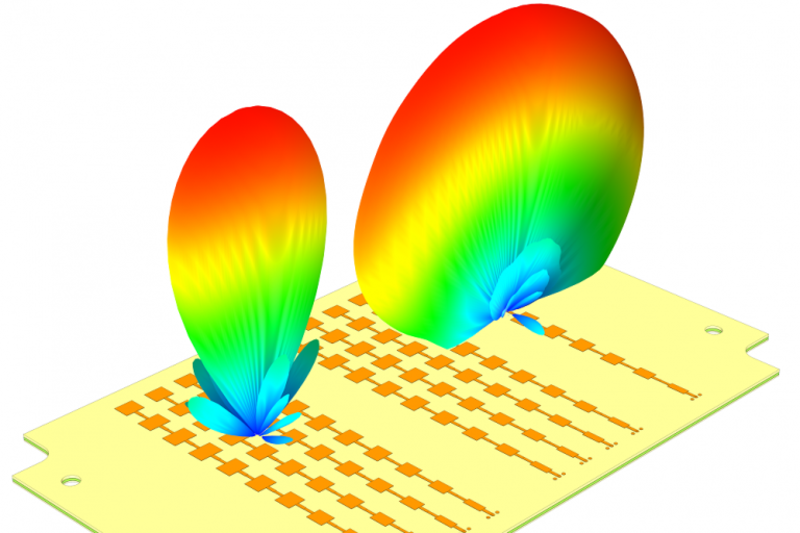
The graph shows the simulation of the far field of a transmitting antenna (wide radiation angle) and a receiving antenna (narrow angle).
IMST also develops the signal processing for the microprocessor of the radar module. First, the data is subjected to a 2-dimensional FFT, resulting in the range-Doppler plot. Both the distance and the relative speed are determined for each detected target. A predefined threshold value is used to determine whether the target is relevant and should be pursued further (target detection). For these targets the parameters RCS (Radar Cross Section), distance, relative speed and object angle are determined. The list of targets is expanded with each measurement and passed to a multi-target tracking algorithm that computes the motion profile of each target using a Kalman filter. This reduces the number of false alarms and interpolates unnatural jumps or dropouts in the measurement data. Finally, the generated target list is converted into a compact data packet and made available to the central unit of the driver assistance system via the digital interface. It is then decided how and via which actuators the cyclist will be informed.
The radar software offers two basic options for accessing the generated measurement data or detection lists:
- Command mode, in which the current data set is actively queried via a special command,
- Streaming mode, in which the radar independently takes measurements at the maximum possible speed and sends the data to the user "without being asked".
The radar hardware has been completed since early October 2018. A new baseband board with a powerful radar signal processor drives the front end. Hardware and firmware were commissioned and tested by the end of 2018. As of 2019, the radar was installed on a pedelec together with the partners and field tests were carried out jointly.
Our project partners are:
- GeoMobile GmbH, Dortmund
- Niederrhein University of Applied Sciences, Krefeld
- Smart LivingAnwendung für Service-Wohnen GmbH, Dortmund
The project sponsor is:
- NRW, Forschungszentrum Jülich GmbH
This project is supported by the European Union and the state of North Rhine-Westphalia